
Ба шабакаҳои иҷтимоии мо обуна шавед, то паёми фаврӣ гиред
Дар давраи пешрафтҳои технологӣ, системаҳои навигатсионӣ ҳамчун рукнҳои бунёдӣ пайдо шуданд, ки пешрафтҳои сершуморро ба вуҷуд оварданд, махсусан дар бахшҳои дақиқи муҳим.Саёҳат аз паймоиши оддии осмонӣ то системаҳои мукаммали навигатсионии инерсиалӣ (INS) кӯшишҳои бебаҳои инсониятро барои ҷустуҷӯ ва дақиқии дақиқ нишон медиҳад.Ин таҳлил ба механикаи мураккаби INS амиқ омӯхта, технологияи муосири гироскопҳои нахи оптикӣ (FOGs) ва нақши муҳими поляризатсия дар нигоҳ доштани ҳалқаҳои нахиро омӯхтааст.
Қисми 1: Рамз кардани системаҳои навигатсионии инерсиалӣ (INS):
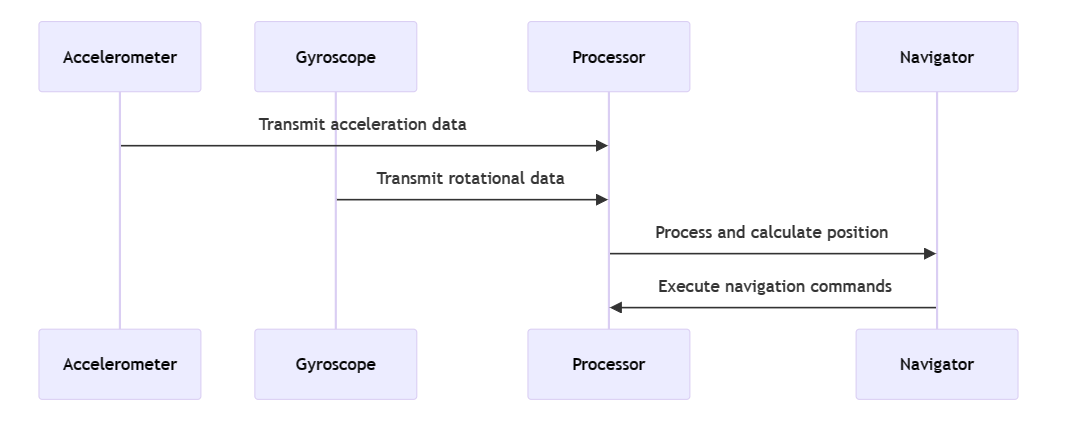
Системаҳои навигатсионии инерсиалӣ (INS) ҳамчун василаҳои мустақили навигатсионӣ фарқ мекунанд, ки новобаста аз сигналҳои беруна мавқеъ, самт ва суръати мошинро дақиқ ҳисоб мекунанд.Ин системаҳо сенсорҳои ҳаракат ва гардишро ҳамоҳанг карда, бо моделҳои ҳисоббарорӣ барои суръат, мавқеъ ва самти ибтидоӣ бефосила муттаҳид мешаванд.
Архетипии INS се ҷузъи асосиро дар бар мегирад:
· Акселерометрҳо: Ин унсурҳои муҳим суръатбахшии хаттии мошинро сабт мекунанд ва ҳаракатро ба маълумоти ченшаванда табдил медиҳанд.
· Гироскопҳо: Интегралӣ барои муайян кардани суръати кунҷӣ, ин ҷузъҳо барои самти система муҳиманд.
· Модули компютерӣ: Маркази асабии INS, коркарди маълумоти гуногунҷанба барои ба даст овардани таҳлили мавқеъ дар вақти воқеӣ.
Иммунитети INS ба халалдоршавии беруна онро дар бахшҳои мудофиа ҳатмӣ месозад.Бо вуҷуди ин, он бо "дрейф" - таназзули тадриҷии дақиқ мубориза мебарад, ки ҳалли мураккабро ба монанди синтези сенсор барои кам кардани хатогиҳо талаб мекунад (Chatfield, 1997).
Қисми 2. Динамикаи амалиётии гироскопи нахи оптикӣ:
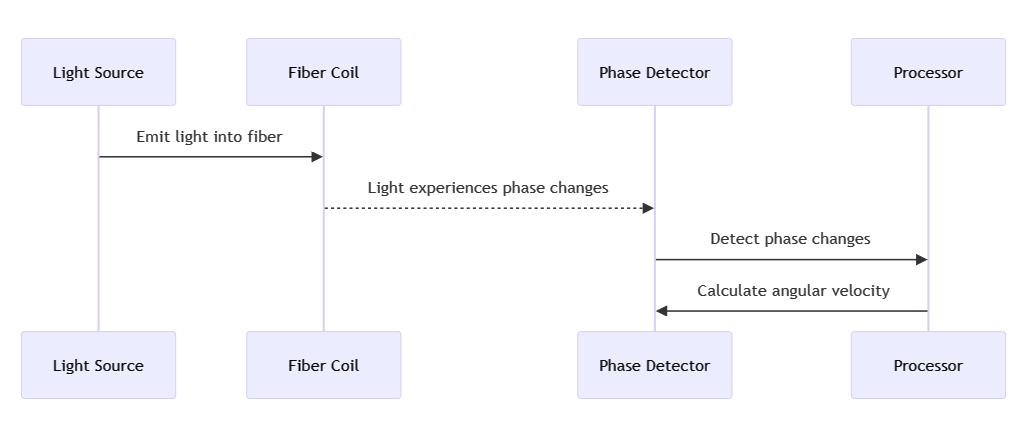
Гироскопҳои нахи оптикӣ (FOGs) аз давраи тағирёбанда дар ҳассосияти гардиш, бо истифода аз дахолати рӯшноӣ хабар медиҳанд.Бо дақиқии аслӣ, FOGs барои мӯътадилсозӣ ва навигатсияи мошинҳои кайҳонӣ муҳим аст.
ТУманҳо аз рӯи эффекти Sagnac кор мекунанд, ки дар он рӯшноӣ дар самтҳои муқобил дар дохили чархи нахи даврзананда ҳаракати фазаро, ки бо тағирёбии суръати гардиш алоқаманд аст, зоҳир мекунад.Ин механизми нозук ба метрикаи дақиқи суръати кунҷӣ табдил меёбад.
Компонентҳои асосӣ иборатанд аз:
· Сарчашмаи рӯшноӣ: Нуқтаи ибтидоӣ, маъмулан лазер, оғози сафари ҳамоҳангшудаи нур.
· Капкаи нахи: Шабакаи оптикии печонидашуда траекторияи рӯшноиро дароз мекунад ва ба ин васила эффекти Сагнакро тақвият медиҳад.
· Фотодетектор: Ин ҷузъ шаклҳои мураккаби дахолати рӯшноиро муайян мекунад.
Қисми 3: Аҳамияти поляризатсия дар нигоҳ доштани ҳалқаҳои нахи:
Ҳалқаҳои нигоҳдории нахи поляризатсия (PM), ки барои туманҳо хосанд, ҳолати якхелаи поляризатсияи рӯшноиро таъмин мекунанд, ки муайянкунандаи калидӣ дар дақиқии намунаи интерференсия.Ин нахҳои махсусгардонидашуда, ки бо паҳншавии режими поляризатсия мубориза мебаранд, ҳассосияти FOG ва ҳаққонияти маълумотро тақвият медиҳанд (Керси, 1996).
Интихоби нахҳои PM, ки аз ҷониби ҳолатҳои амалиётӣ, хусусиятҳои ҷисмонӣ ва ҳамоҳангии системавӣ дикта карда мешавад, ба нишондиҳандаҳои умумии фаъолият таъсир мерасонад.
Қисми 4: Барномаҳо ва далелҳои эмпирикӣ:
FOGs ва INS дар барномаҳои гуногун резонанс пайдо мекунанд, аз ташкили парвозҳои бесарнишин то таъмини суботи кинематографӣ дар шароити пешгӯинашавандаи муҳити зист.Шаҳодати эътимоднокии онҳо ҷойгиршавии онҳо дар Марс Роверси NASA мебошад, ки ба навигатсионии бехатарии беруна мусоидат мекунад (Маймон, Ченг ва Маттис, 2007).
Траекторияҳои бозор ҷойгоҳи афзояндаи ин технологияҳоро бо векторҳои тадқиқотӣ барои мустаҳкам кардани устувории система, матритсаҳои дақиқ ва спектрҳои мутобиқшавӣ пешбинӣ мекунанд (MarketsandMarkets, 2020).

Гироскопи ҳалқаи лазерӣ
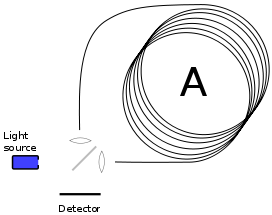
Схемати гироскопи нахи оптикӣ дар асоси эффекти sagnac
Иқтибосҳо:
- Чатфилд, AB, 1997.Асосхои навигацияи инерциалии дакики баланд.Пешрафти кайхоннавардй ва аэронавтика, чилди.174. Рестон, VA: Институти амрикоии аэронавтика ва астронавтика.
- Kersey, AD, et al., 1996. "Gyros нахи оптикӣ: 20 соли пешрафти технология", дарКорҳои IEEE,84(12), с. 1830-1834.
- Maimone, MW, Cheng, Y., and Matthies, L., 2007. "Одометрияи визуалӣ дар Роверсҳои Тадқиқоти Марс - Воситаи таъмини ронандагии дақиқ ва тасвири илмӣ,"Маҷаллаи IEEE Robotics & Automation,14(2), сах. 54-62.
- MarketsandMarkets, 2020. "Бозори системаи навигатсионии инерсиалӣ аз рӯи дараҷа, технология, барнома, ҷузъ ва минтақа - Пешгӯии глобалӣ то соли 2025."
Радди масъулият:
- Мо бо ин изҳор менамоем, ки баъзе тасвирҳои дар вебсайти мо нишон додашуда аз интернет ва Википедия бо мақсади такмили таҳсил ва мубодилаи иттилоот ҷамъоварӣ шудаанд.Мо ҳуқуқҳои моликияти зеҳнии ҳама созандагони аслиро эҳтиром мекунем.Ин тасвирҳо бидуни ҳадафи фоидаи тиҷоратӣ истифода мешаванд.
- Агар шумо фикр кунед, ки ҳама гуна мундариҷаи истифодашуда ҳуқуқи муаллифии шуморо поймол мекунад, лутфан бо мо тамос гиред.Мо беш аз омодаем, ки чораҳои дахлдор андешем, аз ҷумла нест кардани тасвирҳо ё пешниҳоди тавсифи дуруст, барои таъмини риояи қонунҳо ва қоидаҳои моликияти зеҳнӣ.Ҳадафи мо нигоҳ доштани платформае мебошад, ки аз мундариҷа бой, одилона ва эҳтиром ба ҳуқуқи моликияти зеҳнии дигарон бошад.
- Лутфан бо мо тавассути усули зерин тамос гиред,email: sales@lumispot.cn.Мо ӯҳдадор мешавем, ки пас аз гирифтани ҳама гуна огоҳинома чораҳои фаврӣ андешида, 100% ҳамкорӣ дар ҳалли ҳама гуна мушкилотро таъмин кунем.
Вақти фиристодан: октябр-18-2023