Барои гирифтани паёмҳои фаврӣ ба шабакаҳои иҷтимоии мо обуна шавед
Дар давраи пешрафтҳои технологӣ, системаҳои навигатсионӣ ҳамчун сутунҳои асосӣ пайдо шуданд, ки пешрафтҳои зиёдеро, бахусус дар бахшҳои муҳими дақиқ, ба вуҷуд оварданд. Сафар аз навигатсияҳои осмонии ибтидоӣ то системаҳои мураккаби навигатсияҳои инерсиалӣ (INS) талошҳои устувори инсониятро барои кашфиёт ва дақиқии дақиқ нишон медиҳад. Ин таҳлил ба механикаи мураккаби INS амиқтар ворид шуда, технологияи пешрафтаи гироскопҳои нахи оптикӣ (FOGs) ва нақши калидии поляризатсияро дар нигоҳдории ҳалқаҳои нахӣ меомӯзад.
Қисми 1: Рамзкушоӣ дар системаҳои навигатсионии инерсиалӣ (INS):
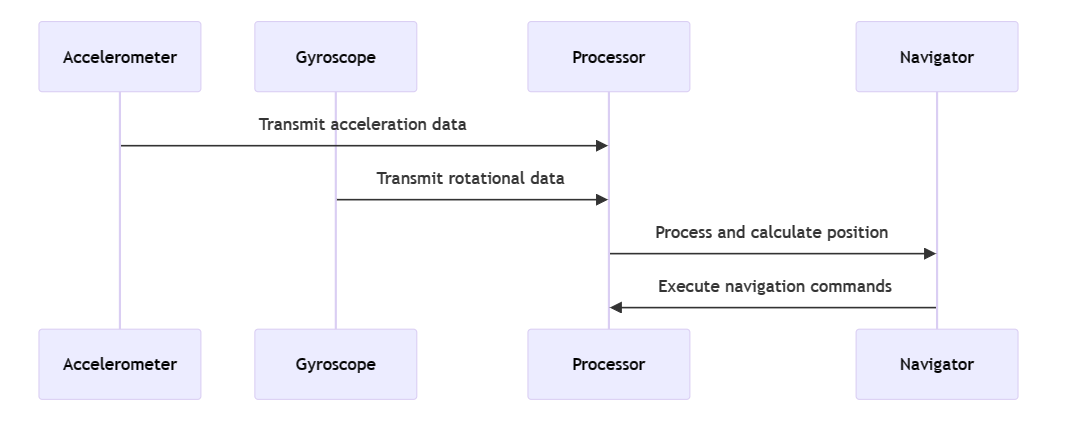
Системаҳои навигатсионии инерсиалӣ (INS) ҳамчун воситаҳои навигатсионии мустақил фарқ мекунанд, ки мавқеъ, самт ва суръати воситаи нақлиётро новобаста аз сигналҳои беруна дақиқ ҳисоб мекунанд. Ин системаҳо сенсорҳои ҳаракат ва гардишро ҳамоҳанг мекунанд ва бо моделҳои ҳисоббарорӣ барои суръати ибтидоӣ, мавқеъ ва самт ба таври бефосила муттаҳид мешаванд.
INS архетипӣ се ҷузъи асосиро дар бар мегирад:
· Акселерометрҳо: Ин унсурҳои муҳим шитоби хаттии воситаи нақлиётро сабт мекунанд ва ҳаракатро ба маълумоти ченшаванда табдил медиҳанд.
· Гироскопҳо: Интеграли барои муайян кардани суръати кунҷӣ буда, ин ҷузъҳо барои самти система муҳим мебошанд.
· Модули компютерӣ: Маркази асабии INS, ки маълумоти бисёрҷанбаро барои ба даст овардани таҳлили мавқеъӣ дар вақти воқеӣ коркард мекунад.
Иммунитети INS ба халалдоркуниҳои беруна онро дар бахшҳои мудофиа ивазнашаванда мегардонад. Бо вуҷуди ин, он бо «дрифт» - коҳиши тадриҷии дақиқӣ - мубориза мебарад, ки барои кам кардани хатогиҳо роҳҳои ҳалли мураккабро ба монанди омезиши сенсорҳо талаб мекунад (Чатфилд, 1997).
Қисми 2. Динамикаи амалиётии гироскопи нахи оптикӣ:
Гироскопҳои нахи оптикӣ (FOGs) давраи тағйирдиҳандаро дар сенсори гардишӣ бо истифода аз дахолати рӯшноӣ нишон медиҳанд. FOGs, ки дар асл дақиқ аст, барои устуворӣ ва паймоиши воситаҳои нақлиёти кайҳонӣ муҳиманд.
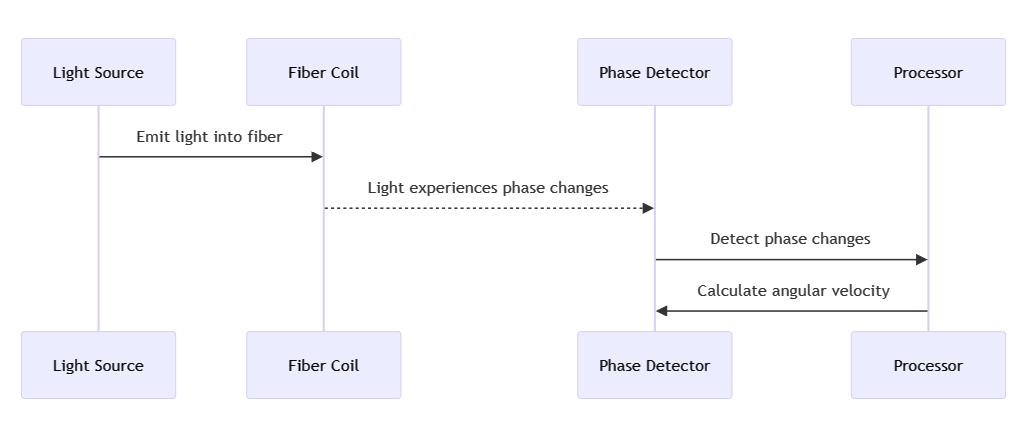
FOG-ҳо дар асоси эффекти Сагнак кор мекунанд, ки дар он нур, ки дар дохили печи нахи гардишкунанда дар самтҳои муқобил ҳаракат мекунад, тағйироти фазаро нишон медиҳад, ки бо тағирёбии суръати гардиш алоқаманд аст. Ин механизми нозук ба метрикаҳои дақиқи суръати кунҷӣ табдил меёбад.
Компонентҳои асосӣ иборатанд аз:
· Манбаи рӯшноӣ: Нуқтаи ибтидоӣ, ки одатан лазер аст, сафари когерентии рӯшноиро оғоз мекунад.
· Капсулаи нахӣ: Ноқили оптикии печонидашуда, траекторияи рӯшноиро дароз мекунад ва бо ин васила таъсири Сагнакро тақвият медиҳад.
· Фотодетектор: Ин ҷузъ намунаҳои мураккаби интерференсияи рӯшноиро муайян мекунад.
Қисми 3: Аҳамияти поляризатсия Нигоҳдории ҳалқаҳои нахӣ:
Ҳалқаҳои нахи нигоҳдории поляризатсия (PM), ки барои FOG-ҳо муҳиманд, ҳолати ягонаи поляризатсияи рӯшноиро таъмин мекунанд, ки омили калидии дақиқии намунаи интерференсия мебошад. Ин нахҳои махсусгардонидашуда, ки бо парокандагии ҳолати поляризатсия мубориза мебаранд, ҳассосияти FOG ва эътимоднокии маълумотро афзоиш медиҳанд (Kersey, 1996).
Интихоби нахҳои PM, ки аз талаботи амалиётӣ, хусусиятҳои физикӣ ва ҳамоҳангии системавӣ муайян карда мешаванд, ба нишондиҳандаҳои умумии фаъолият таъсир мерасонанд.
Қисми 4: Татбиқ ва далелҳои эмпирикӣ:
FOG ва INS дар барномаҳои гуногун, аз ташкили парвозҳои бесарнишин то таъмини устувории синамоӣ дар шароити пешгӯинашавандагии муҳити зист, ҳамбастагӣ пайдо мекунанд. Далели эътимоднокии онҳо ҷойгиркунии онҳо дар роверҳои Миррихи NASA мебошад, ки ба новбари берун аз заминӣ бехатар ва ноком мусоидат мекунад (Маймоне, Ченг ва Маттис, 2007).
Траекторияҳои бозорӣ як макони рушдёбандаро барои ин технологияҳо пешгӯӣ мекунанд, ки векторҳои тадқиқотӣ барои тақвияти устувории система, матритсаҳои дақиқ ва спектрҳои мутобиқшавӣ равона шудаанд (MarketsandMarkets, 2020).

Гироскопи лазерии ҳалқавӣ
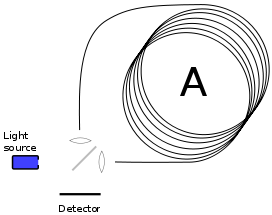
Схемаи гироскопи нахӣ-оптикӣ, ки бар асоси эффекти сагнак асос ёфтааст
Адабиёт:
- Чатфилд, AB, 1997.Асосҳои навигатсияи инерсиалии дақиқи баланд.Пешрафт дар кайҳоннавардӣ ва аэронавтика, ҷилди 174. Рестон, Вирҷиния: Институти Амрико оид ба аэронавтика ва астронавтика.
- Керси, А.Д. ва дигарон, 1996. "Гироскопҳои нахи оптикӣ: 20 соли пешрафти технологӣ", дарМаҷаллаи IEEE,84(12), саҳ. 1830-1834.
- Маймон, МВ, Ченг, Ю. ва Маттис, Л., 2007. "Одометрияи визуалӣ дар роверҳои омӯзиши Миррих - абзоре барои таъмини ронандагии дақиқ ва тасвири илмӣ",Маҷаллаи робототехника ва автоматикунонии IEEE,14(2), саҳ. 54-62.
- MarketsandMarkets, 2020. "Бозори системаҳои навигатсионии инерсиалӣ аз рӯи дараҷа, технология, татбиқ, ҷузъ ва минтақа - Пешгӯии ҷаҳонӣ то соли 2025."
Раддия:
- Мо бо ин изҳор медорем, ки баъзе тасвирҳои дар вебсайти мо нишондодашуда аз интернет ва Википедия бо мақсади рушди маориф ва мубодилаи иттилоот ҷамъоварӣ шудаанд. Мо ба ҳуқуқи моликияти зеҳнии ҳамаи эҷодкунандагони аслӣ эҳтиром мегузорем. Ин тасвирҳо бе мақсади ба даст овардани фоидаи тиҷоратӣ истифода мешаванд.
- Агар шумо боварӣ дошта бошед, ки ягон мундариҷаи истифодашуда ҳуқуқи муаллифии шуморо поймол мекунад, лутфан бо мо тамос гиред. Мо омодаем чораҳои мувофиқ, аз ҷумла нест кардани тасвирҳо ё пешниҳоди истиноди дурустро барои таъмини риояи қонунҳо ва қоидаҳои моликияти зеҳнӣ андешем. Ҳадафи мо нигоҳ доштани платформаест, ки аз мундариҷа бой, одилона ва ба ҳуқуқҳои моликияти зеҳнии дигарон эҳтиром гузорад.
- Лутфан, бо мо тавассути усули тамос бо зерин тамос гиред,email: sales@lumispot.cnМо ӯҳдадор мешавем, ки пас аз гирифтани ҳама гуна огоҳӣ чораҳои фаврӣ андешем ва дар ҳалли чунин масъалаҳо 100% ҳамкорӣ хоҳем кард.
Вақти нашр: 18 октябри соли 2023